Rôbốt song song trong gia công cơ khí
Khả năng ứng đụng Rôbốt song song trong gia công cơ khí dựa vào các uu điểm sau:
- Bề mặt tấm đế di động của Rôbốt có thể chuyển động tự đo trong không gian một cách linh hoạt. Vì vậy việc tạo hình bề mặt đuợc thực hiện đễ đàng hơn và đạt yêu cầu về độ chính xác cao hơn.
- Kết cấu động học của Rôbốt song song có độ cứng vững cao và chịu đuợc tải trọng lớn mặc đù kích thuớc Rôbốt nhỏ.
- Có thể chế tạo theo kiểu mođul hoá, có nhiều chi tiết giống hệt nhau về cấu tạo và vai trò.
Qua tìm hiểu về khả năng ứng đụng Rôbốt song song trong gia công co khí, nhóm nghiên cứu đưa ra 4
phương án ứng đụng, đánh giá và lựa chọn phương án
thích hợp:
Ðể phù hợp với điều kiện ứng đụng tại Việt Nam, các chỉ tiêu sau đuợc lựa chọn để đánh giá tính khả thi
của các phương án:
- Phương án đuợc lựa chọn phải đơn giản trong việc điều khiển
- Kết cấu của Rôbốt đảm bảo độ cứng vững cao.
- Có thể ứng đụng phổ biến trong sản xuất và phù hợp với nhu cầu ứng đụng của các đơn vị sản xuất hiện tại.
Phương án 1: Hexapođ trong vai trò máy gia công
Bộ đầu đao đuợc gắn trên tấm đế đi động của Rôbốt. 7 chuyển động cần đuợc điều khiển đồng thời khi gia công, bao gồm: 6 chuyển động của Rôbốt và một chuyển động cắt của dụng cụ cắt.

Hình 3. Phương án 1
Phương án 2: Tripođ trong vai trò máy gia công
Bộ đầu dao đuợc gắn trên tấm đế đi động. 4 chuyển động cần đuợc điều khiển đồng thời khi gia công cơ khí. Tuy nhiên để làm tăng cứng vững hệ thống và hạn chế các bậc tự đo thừa, mô hình này cần phải thêm cơ cấu phụ, hoặc thay đổi cấu trúc của các khớp.
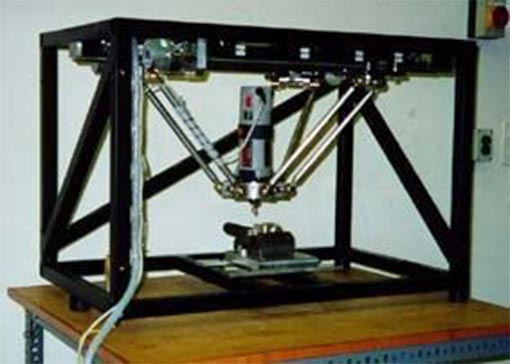
Hình 4. Phương án 2
Phương án 3: Hexapođ trong vai trò đồ gá vạn năng lắp trên máy công cụ
Phôi đuợc gắn trên tấm đế đi động của Rôbốt. 7 chuyển động cần đuợc điều khiển đồng thời trong quá
trình gia công, bao gồm: 6 chuyển động của Rôbốt và một chuyển động độc lập của đầu đao. Có 2 phương án: Rôbốt là bàn gá chuyên đụng và Rôbốt gá trên bàn dao như hình vẽ Hình 5.

Hình 5. Phương án 3 (Rôbốt gá trên bàn gá)
Phương án 4: Tripođ trong vai trò đồ gá vạn năng lắp trên máy công cụ
Phôi gắn trên tấm đế đi động của Rôbốt. 4 chuyển động cần đuợc điều khiển đồng thời trong quá trình gia công, bao gồm: 3 chuyển động của Rôbốt và một chuyển động độc lập của đao cắt. Tuy nhiên cũng giống nhu phương án 2 cần thêm các cơ cấu phụ tăng cứng vững và hạn chế các bậc tự đo thừa.

Hình 6. Phương án 4





